
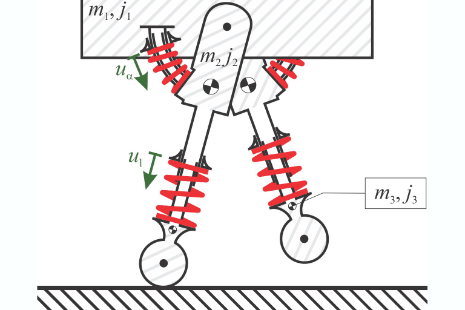
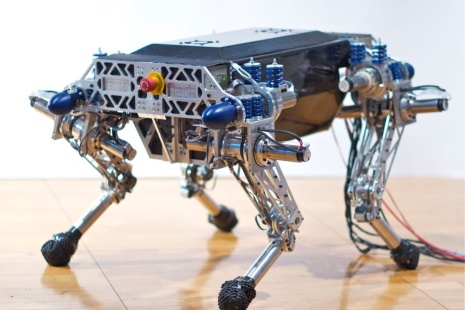
Our research seeks to systematically exploit mechanical dynamics to make future robots faster, more efficient, and more agile than today’s kinematically controlled systems. Inspired by nature, we will design and control robots whose motion emerges in great part passively from the interaction of inertia, gravity, and elastic oscillations, and is merely initiated and shaped through active actuator inputs. Among the beneficial properties of such systems are the avoidance of negative actuator work to improve efficiency, the increase of peak output power to improve speed, and a passive adaptation to their surroundings to improve agility and robustness. Additionally, this concept will enable us to build the systems very lightweight, thereby improving mobility and allowing the robots to work safely side by side with human beings.
In the long term vision, our research will allow the development of systems that reach and even exceed the agility of humans and animals. It will enable us to build autonomous robots that can run as fast as a cheetah and as enduring as a husky, while mastering the same terrain as a mountain goat. And it will provide us with novel designs for prosthetics, orthotics, and active exoskeletons that help restoring the locomotion skills of the disabled and can be used as training and rehabilitation devices for the injured.
To this end, we will develop appropriate methods for the control and design of robots, and create conceptual as well as practical prototypes for applications in locomotion, manipulation, and the direct interaction with humans. We will draw inspiration from biomechanics and biology, deepen our theoretical understanding of natural dynamics through experiments and simulation, and employ advanced numerical optimization as primary tool for systematic design and development. The research will be conducted on an integrated system level, as well as for individual components, such as actuators and controllers that are inherently soft, yet allow for high fidelity force/torque control.


{kind=link}
Contact
