

In this project I tried to build a parametrically excited pendulum (sometimes called vertically driven pendulum or Kapitza pendulum) by using LEGO Mindstorms.
A pendulum with a fixed suspension point has two equilibria of which one is hanging downward and is stable, and the other one is standing upward and is unstable. The so-called vertically driven pendulum has a suspension point which moves sinusoidally up and down. The upward equilibrium position can become locally asymptotically stable above a certain excitation frequency. The stability of the equilibria can be calculated using Floquet theory or by using an averaging method.

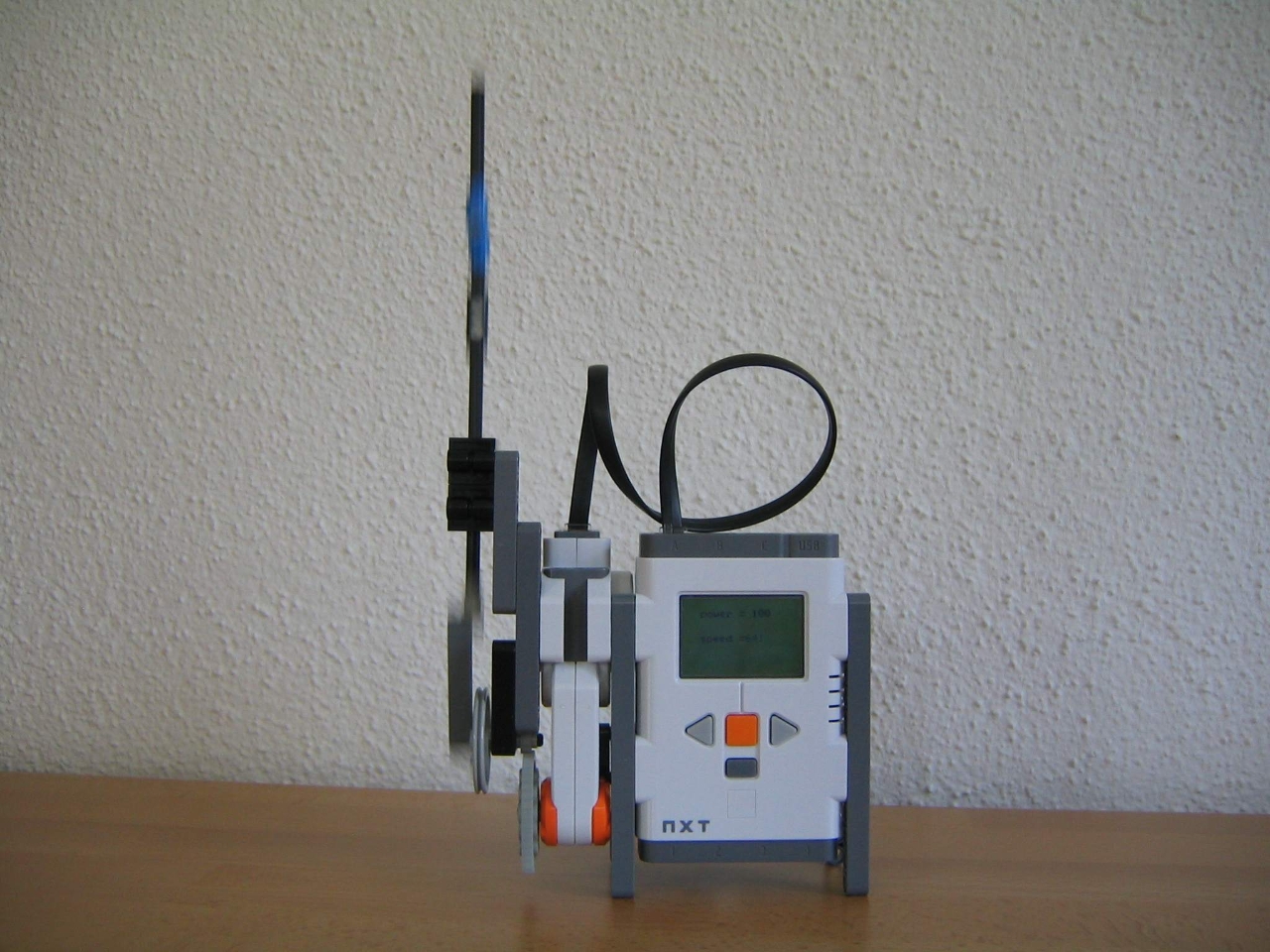
The LEGO Vertically Driven Pendulum consists of a LEGO NXT microprocessor and a LEGO NXT motor which drives the suspension point up and down. A pendulum, being an axle of 6 studs, is connected can freely rotate around the suspension point. A LEGO NXT program reads the data of the built-in rotation sensor of the LEGO NXT motor and calculates it to an angular speed of the crank shaft (measured in RPM). The power which is delivered to the motor can be adjusted with the grey buttons on the LEGO NXT. The upward equilibrium is stable above approximately 650 RPM.
An extensive reference to the LEGO Vertically Driven Pendulum has been in the book Eureka! Problem solving with LEGO Robotics by Claude Baumann.
Data LEGO Vertically Driven Pendulum
| a = 12 mm | excitation amplitude |
| l = 51 mm | length of the pendulum |
| w = 650 RPM = 68 rad/s | excitation frequency |
| g = 9.81 m/s2 | gravitational acceleration |
| e = 3/2 a/l = 0.3529 | |
| w0 = 3/2 g/l = 16.99 rad/s |
An approximate criterion for the stability of the upward equilibrium is e2 w2 > 2 w02.
{kind=link}
Building Instructions
You can download the building instructions (a step-by-step guide) here:
Contact

Remco I. Leine
Prof. Dr. ir. habil.Direktor