
Wooden toys are very interesting systems from a dynamical point of view. We studied a number of wooden toys in our paper Nonlinear Dynamics of Some Wooden Toys with Impact and Friction. Some of the results are shown on this webpage.

The Woodpecker Toy
The Woodpecker Toy is a toy with interesting dynamic behaviour, showing both impact and friction phenomena. The toy consists of a sleeve, a spring and the woodpecker. The hole in the sleeve is slightly larger than the diameter of the pole, thus allowing a kind of pitching motion interrupted by impacts with friction. Here you see an animation of the motion.
{kind=link}
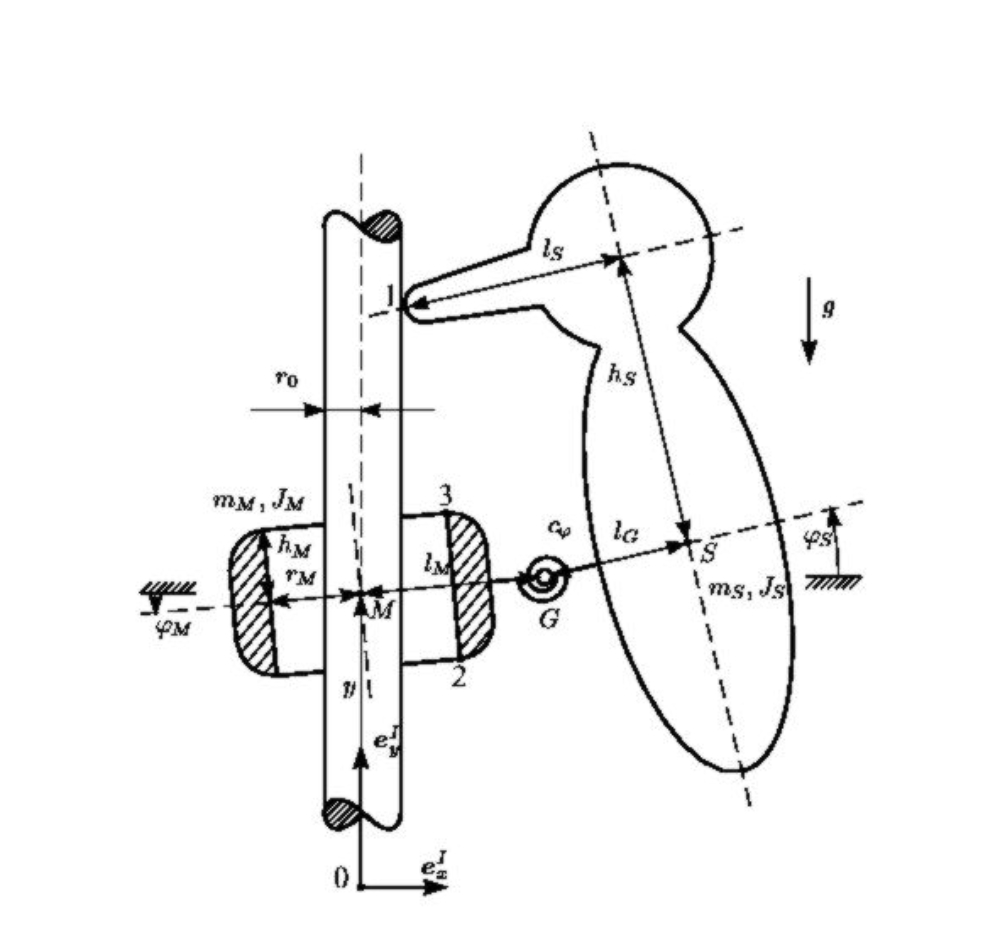
The Woodpecker Toy is a system which can only operate in the presence of friction as it relies on combined impacts and jamming. Restitution of the beak with the pole is not essential for a periodic motion but enlarges the resemblance with the typical behaviour of a woodpecker. The motion of the toy lies in a plane, which reduces the number of degrees of freedom to model the system. A 3-DOF rigid-body model of the system is shown in the middel figure and the animation is obtained from the numerical analysis of this model.

The Tumbling Toy
The Tumbling Toy consists of a hollow wooden body with on each side two pivots. Within the body is a metal ball, which can roll free along the main axis of the body. The body can tumble down on an inclined saw-toothed wooden rail, on which the pivots step down the teeth of the rail. The tumbling motion is characterized by alternating rotation of the body around one of the two pivots with rolling of the ball from one side of the body to the other.
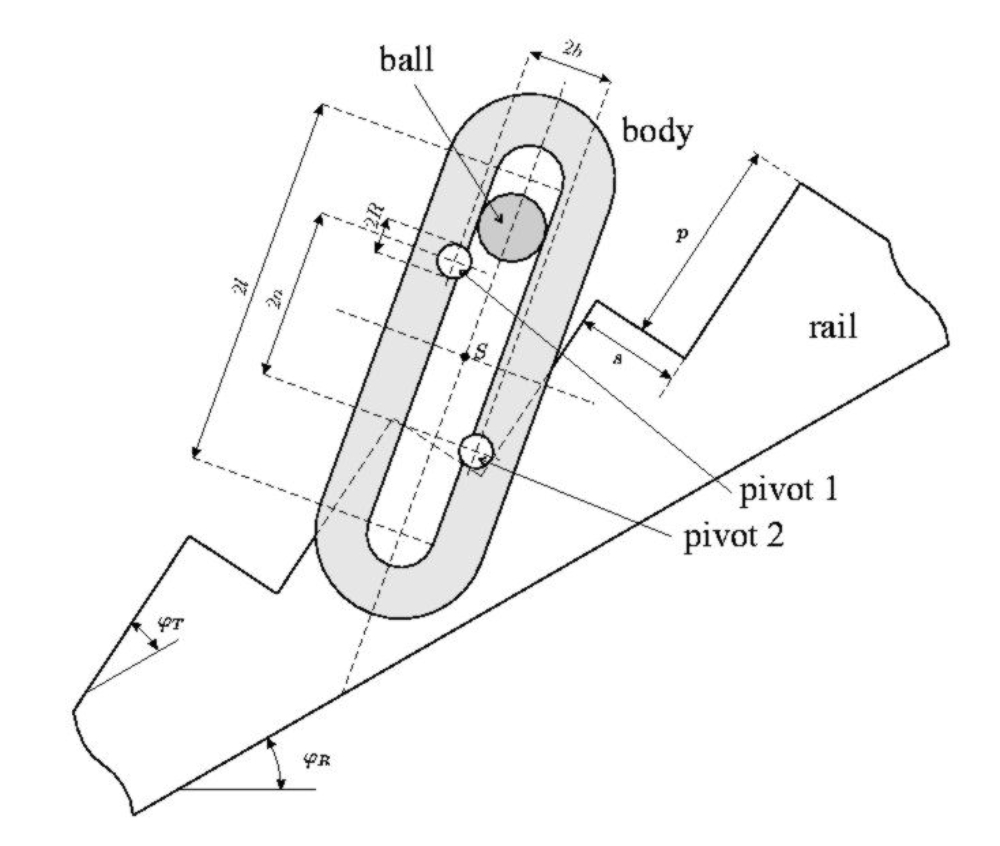
The motion of the tumbling toy is governed by impacts. The model of the toy, shown in the middel figure, contains 4 degrees of freedom: 2 displacements for the wooden body, 1 rotation of the body and 1 displacement of the ball with respact to the body. The great merit of the animation is, that also the movement of the ball can be shown which can not be observed in the real system as it is within the wooden body.
{kind=link}

The Waddling Duck
The Waddling Duck is a toy which "walks" down an inclined slope with a forward-backward rocking motion. The toy consists of a body with a body-fixed front leg and freely rotating rear leg, which is hinged to the body.
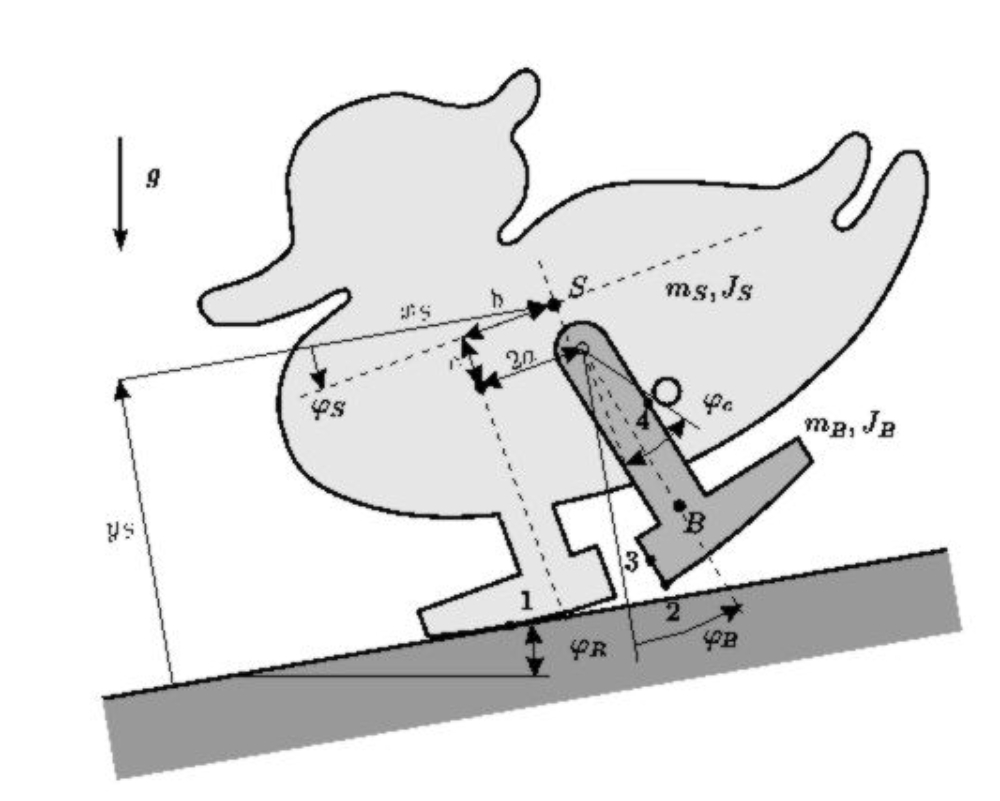
The toy is modeled with four degrees of freedom: the displacements and rotation of the center of gravity of the body with respect to the inclined slope and the rotation of the rear leg. The rotation of the rear leg is constrained by the front leg and a stop. The legs have an identical (mirrored) shape. The feet have a tread described by a circle segment. Sliding motion is observed in the actual toy. No restitution after impact is observed for the actual toy. The impacts are therefore modeled as completely inelastic.
{kind=link}
Contact

Remco I. Leine
Prof. Dr. ir. habil.Direktor