Classical stability and optimal control theory have aimed their attention at smooth dynamical systems. There is a large body of literature on stability and optimal control of smooth systems which rely upon the differentiability characteristics of such systems. However, dealing with non-smooth systems demands a more well-founded mathematical framework which benefits from differential inclusion and variational inequalities.
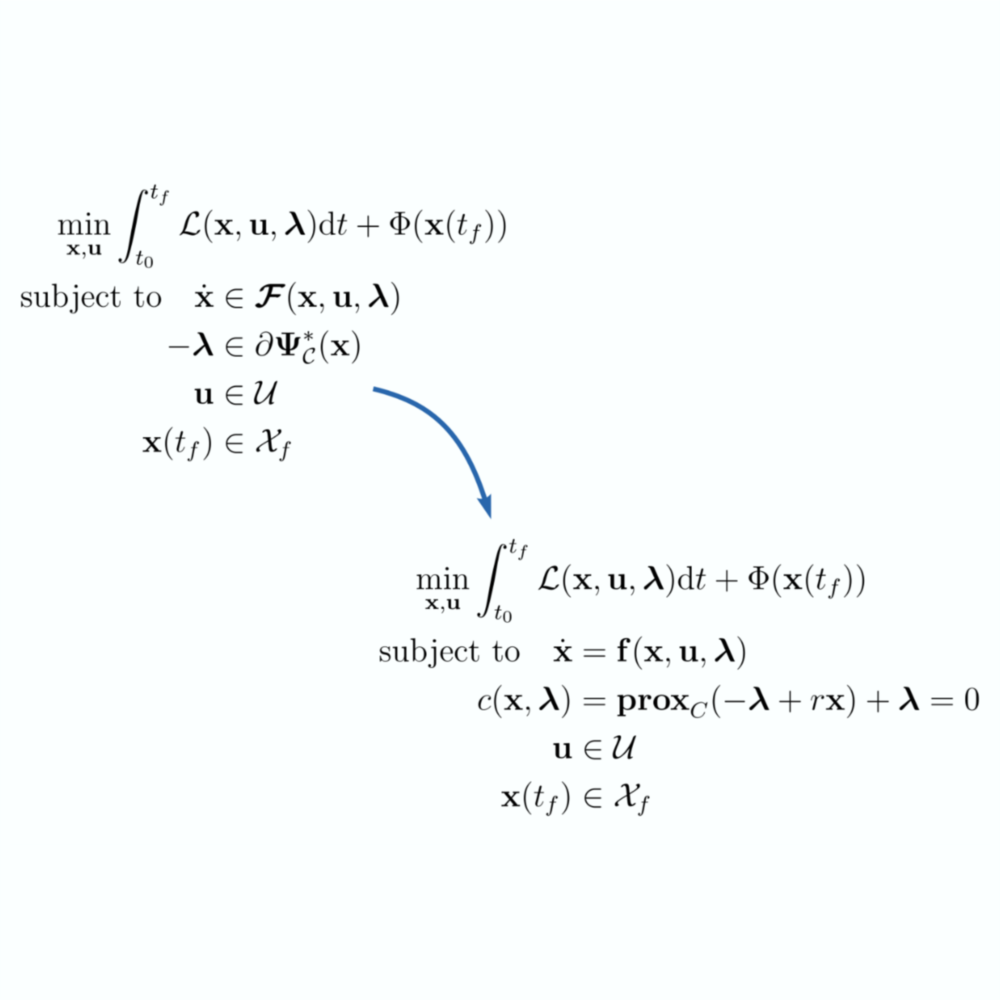
The purpose of this research is to extend the traditional optimal control framework to a wider class of problems. Thereby, non-smooth mechanical systems with unilateral constraints, such as impact and friction, are of great interest. Our objective is to enhance the existing celebrated methods in stability theory and optimal control with (measure) differential inclusions, variational inequalities and set-valued relations. Consequently, this work will contribute to a deeper insight into stability and control of non-smooth dynamical systems.
Kontakt

Remco I. Leine
Prof. Dr. ir. habil.Direktor