
The synchronization phenomenon is encountered in various fields in physics, engineering and biology. Classically, synchronization refers to the asymptotic coincidence of the frequency of periodic oscillators. The phenomenon has been known since the 17th century, when Christiaan Huygens reported that two pendulum clocks, both hanging from a common support, are changing their motion until they swing in phase with the same frequency. More generally, synchronization can be understood as the asymptotic coincidence of parts of the state vectors of two or more systems.
The aim of this project is to investigate how the synchronization theory, developed for smooth systems, extends to mechanical systems with impulsive motion. The states of such systems are generally discontinuous in time: if two bodies are colliding, an impact can occur, i.e. impulsive contact forces lead to velocity jumps.
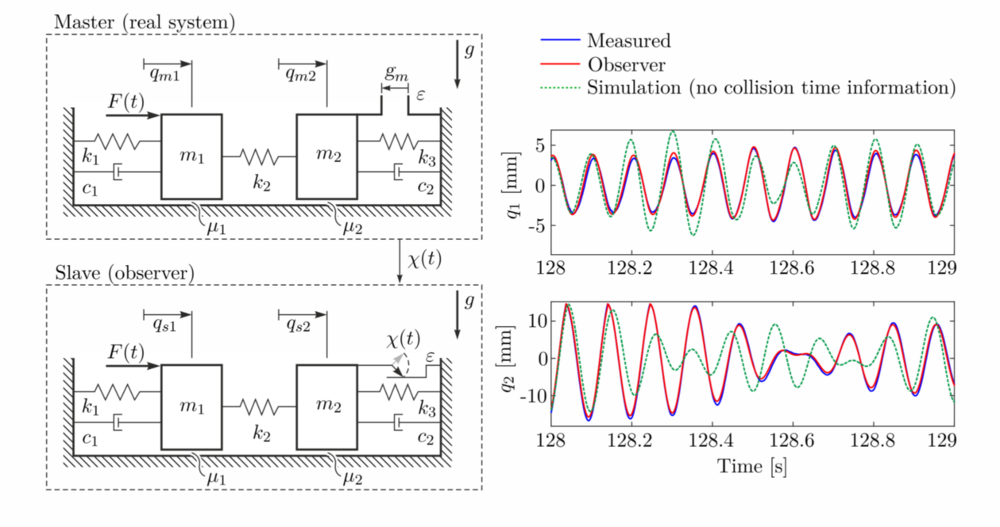
An application of particular interest is the design of state observers. Imagine a master-slave setup consisting of two identical systems which are unidirectionally coupled, i.e. the state of the master system influences the dynamics of the slave system, but not the other way around. If a specific coupling leads to full state synchronization, then a simulated slave system can be used to obtain the state of a real master system. Under the assumption of a maximal monotone impact law, it has been shown that knowledge of the collision time instants is sufficient for obtaining the system‘s state.
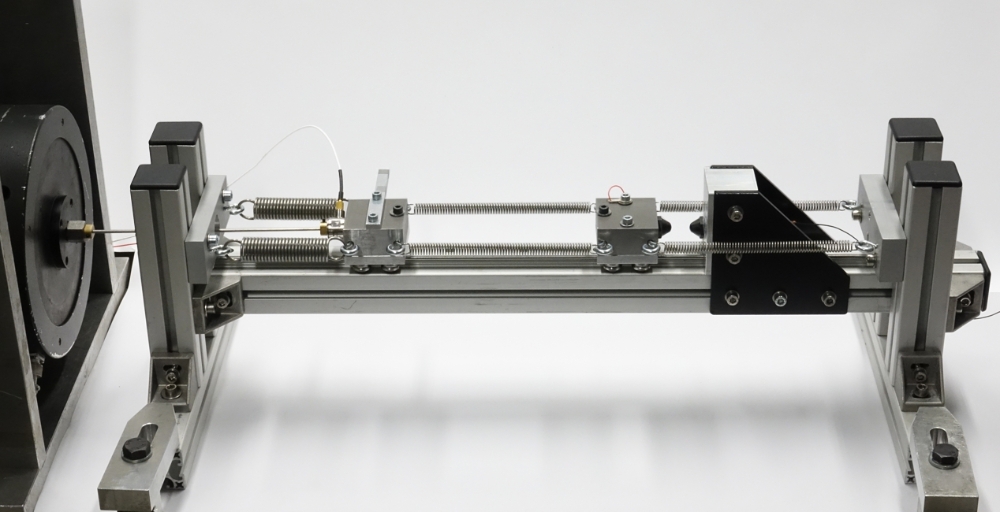
As an example, consider a simple two degrees of freedom mass-spring oscillator, where one mass is excited by an external force, while the other mass can collide with a rigid stop. By measuring the collision time instants and using a model of the setup, the state of the oscillator can be obtained with good accuracy compared to a pure simulation (without any collision time information).
The following question arises. How can this method be used to improve state observers for more complex systems, such as robotic systems with contacts?
Journal articles
- Preiswerk, P. V., & Leine, R. I. (2022). State observers for the time discretization of a class of impulsive mechanical systems. International Journal of Robust and Nonlinear Control. https://doi.org/10.1002/rnc.6168
Proceedings
- Preiswerk, P. V., & Leine, R. I. (2019). A nonsmooth state observer for vibro-impact systems: experimental validation. Proceedings of NODYCON 2019,.
- Preiswerk, P. V., & Leine, R. I. (2018, August). Experimental performance verification of a synchronization based state observer using only collision time information. Proceedings of the ASME 2018 International Design Engineering Technical Conferences (IDETC2018), Article DETC2018–85859.
Kontakt

Remco I. Leine
Prof. Dr. ir. habil.Direktor