Gyroscopic effects play an important role in technical applications such as satellites, aircrafts and wind energy converters.
However, gyroscopic effects which are induced or interacting with frictional contact are not well understood. Several mathematical problems are actively being studied in the scientific literature, i.e. the Euler disk, the tippetop, the Rattleback and the spinning egg problem. These systems serve as mechanical-mathematical archetypes for several friction induced instability phenomena of three dimensional moving bodies in contact with a supporting hyperplane. In particular, the tippetop demonstrates an inverting motion causing the top to rotate on its stem.

The tippetop is a rotationally symmetric top which consists of a spherical body with a stick attached to it (Figure 1.1). If the top is at rest then the stick points vertically upward, such that the geometric center of the sphere is higher than the center of gravity. If the top is spun fast enough, then this equilibrium position becomes unstable due to friction induced gyroscopic forces. The toy top slowly inverts its orientation and seeks its inverted equilibrium.
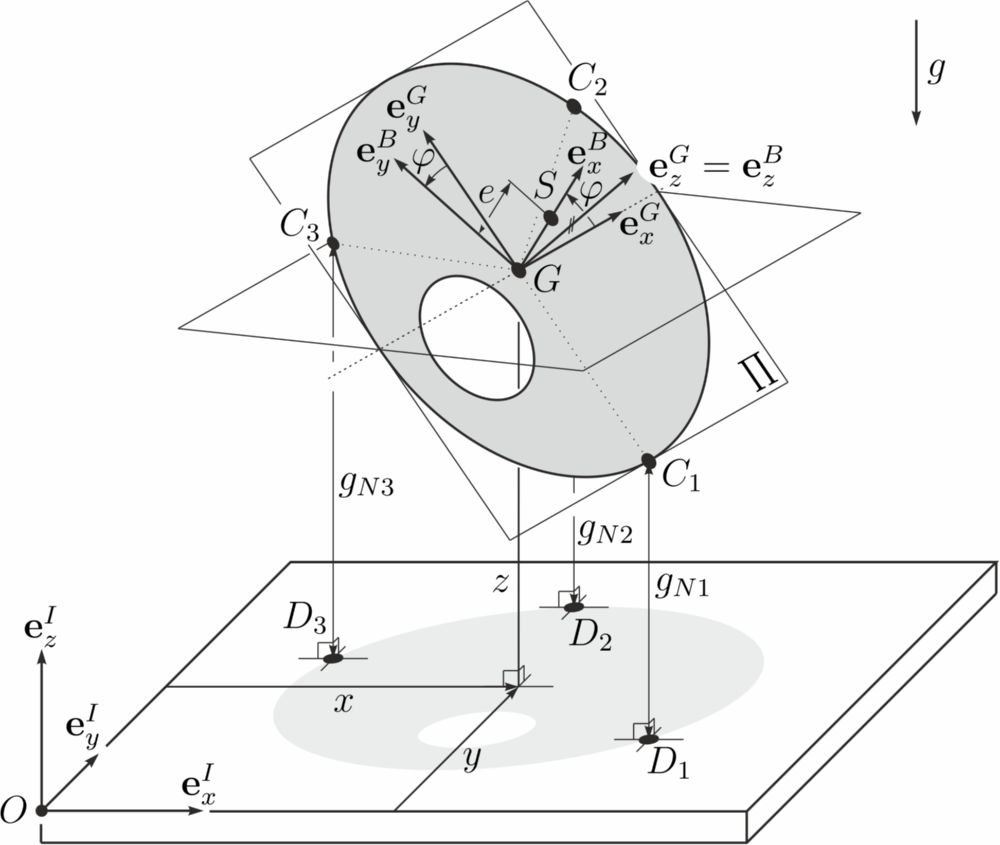
In this project we introduce the “tippedisk” as a new archetype for the study of instability phenomena of three dimensional rigid body systems interacting with a frictional support. We call a “tippedisk” a spinning object, consisting of a thin disk for which the center of mass does not coincide with its geometric center, rotating around an in-plane axis. Similar to the tippetop, the tippedisk finds an inverted orientation when spun rapidly (see video). However, in contrast to the tippetop, the tippedisk does not rotate around an axis of symmetry. Moreover, the contact kinematics of the tippedisk is more complicated.
We aim to conduct a rigorous stability analysis of the tippedisk. The results of the analysis will be validated numerically and experimentally. Hereto, a proper model will be developed, which can handle unilateral contact and set-valued friction laws. The solutions of the numerical model will be compared with experimental data, which comes from 3D Motion Tracking.
{kind=link}
Journal articles
- Sailer, S., & Leine, R. I. (2021). Singularly perturbed dynamics of the tippedisk. Proceedings of the Royal Society A, 477, Article 2256. https://doi.org/10.1098/rspa.2021.0536
- Sailer, S., & Leine, R. I. (2021). Model reduction of the tippedisk: a path to the full analysis. Nonlinear Dynamics, 105, 1955–1975. https://doi.org/10.1007/s11071-021-06649-z
- Sailer, S., Eugster, S. R., & Leine, R. I. (2020). The Tippedisk: a Tippetop without rotational symmetry. Regular and Chaotic Dynamics, 25, Article 6. https://doi.org/10.1134/S1560354720060052
Proceedings
- Sailer, S., & Leine, R. I. (2022, July). Why does the Tippedisk invert? Theory and experiments. Proceedings of the 10th European Nonlinear Dynamics Conference (ENOC2020+2).
- Sailer, S., Eugster, S. R., & Leine, R. I. (2021, December). The Tippedisk: A minimal model for friction-induced inversion. Proceedings of the ECCOMAS Thematic Conference on Multibody Dynamics 2021.
Kontakt

Remco I. Leine
Prof. Dr. ir. habil.Direktor