

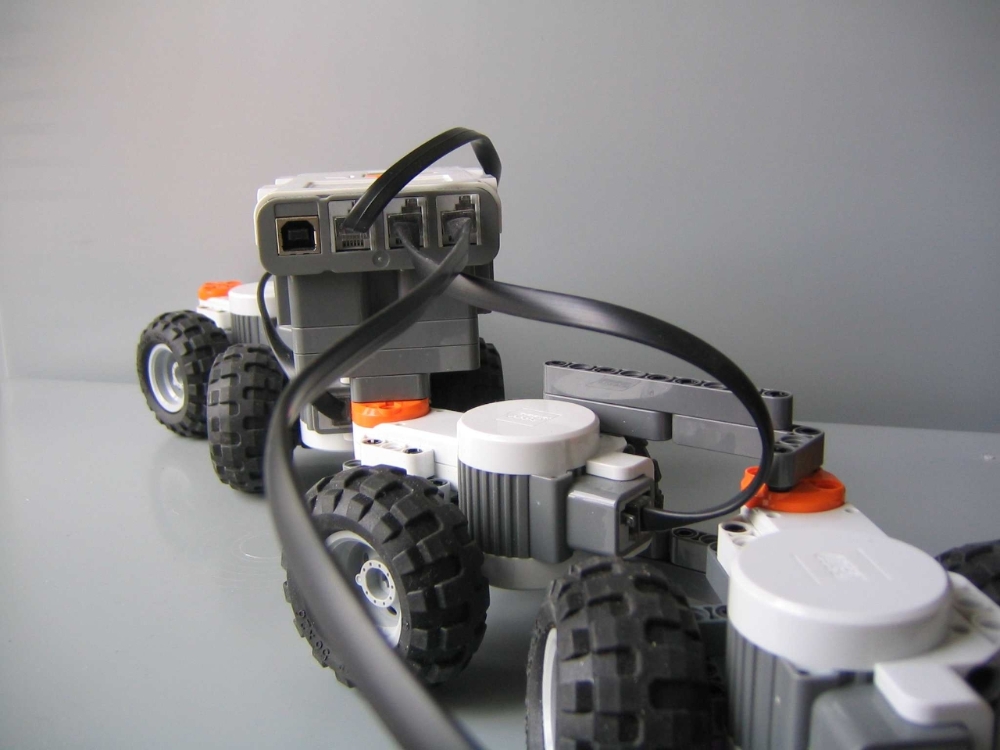
How to build a snake robot with LEGO? Snakes can perform different kinds of locomotion. Lateral undulation is a type of locomotion characterized by a backward propagating flexural wave along the length of the animal's body. Essential for locomotion is that the friction in transversal direction is larger than in longitudinal direction (i.e. along the body) of the snake. The scales on the belly of the snake cause this difference in friction (see article in Nature). Alternatively, the snake may use obstacles such as rocks to push against. Snake robots often use passive wheels to achieve the friction anisotropy.
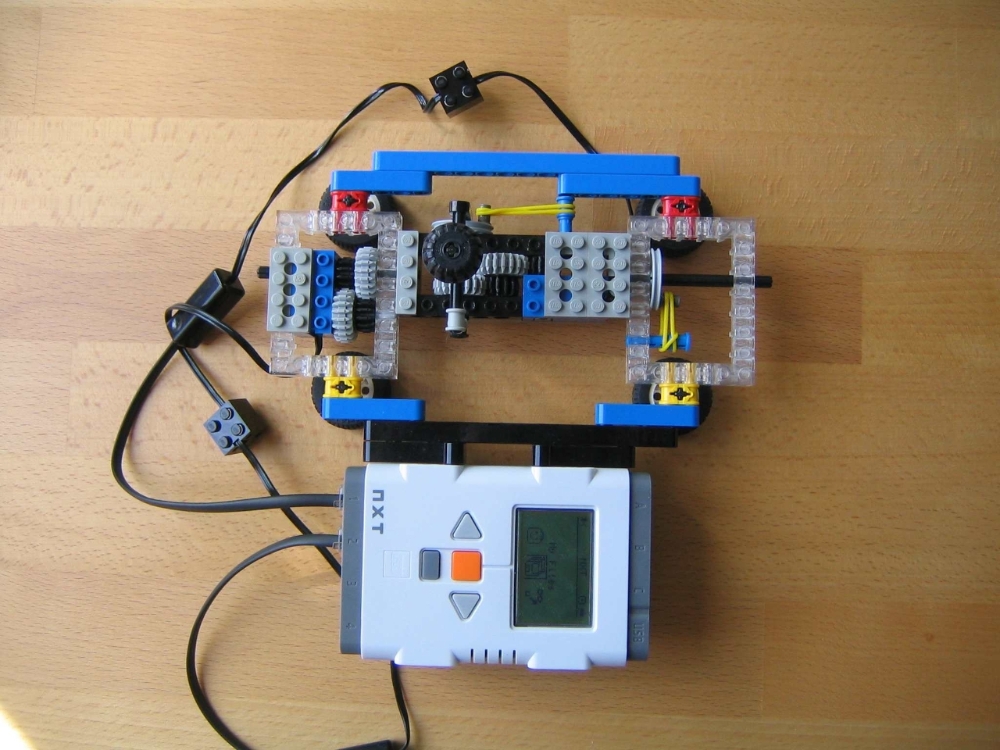
In this project I constructed a remote controlled LEGO snake robot with passive wheels. The robot is constructed in a modular way, i.e. an arbitrary number of segments can be added. The robot and remote control have been programmed with ROBOLAB, a LabView software for LEGO Mindstorms. Here you see an animation of the snake robot:
{kind=link}


see also:
Transeth, A. A., Leine R.I., Glocker, Ch., Pettersen, K. Y., "3D Snake robot motion: Non-smooth modeling, simulations, and experiments" IEEE Transactions on Robotics, Vol. 24, No. 2, pp. 361-376, 2008
Transeth, A. A., Leine R.I., Glocker, Ch., Pettersen, K. Y., Liljebäck, P., "Snake robot obstacle-aided locomotion: Modeling, simulations, and experiments" IEEE Transactions on Robotics, Vol. 24, No. 1, pp. 88-104, 2008
and the reference to these publications in the LEGO robotics book From Bricks to Brains: the embodied cognitive science of LEGO robotics by Dawson, Dupuis and Wilson, AU Press, Edmonton, 2010
Contact

Remco I. Leine
Prof. Dr. ir. habil.Direktor