
{kind=link}
Cam Mechanism for Leg Retraction
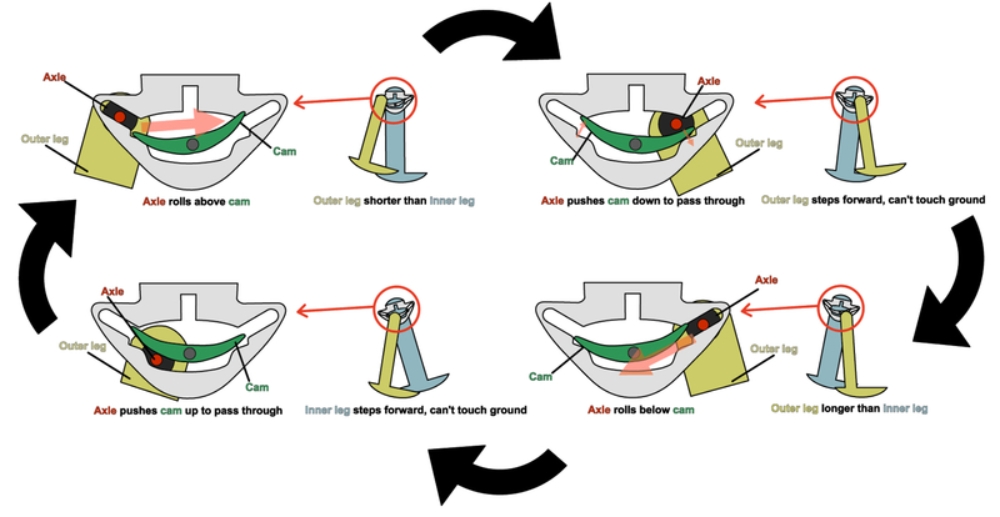
Passive dynamic walkers use gravity to swing each set of legs forward as they take steps down a slope. Yet, in order to walk properly on any given surface, the Moonwalker needs to be able to adjust its leg length. If it were to swing its legs fully extended, they would hit the ground and the robot would fall. Humans use knees to shorten their legs, allowing them to step forward. The Moonwalker, however, uses a cam mechanism to change the length of its legs. This cam mechanism is shown in the figure below. A bearing attached to the outer legs rolls over and under a switching cam which pulls the outer legs up on a forward swing and pushes them down on a backward swing. This alternation ensures that the shorter leg pair is always stepping forward.
{kind=link}
Build Your Own!
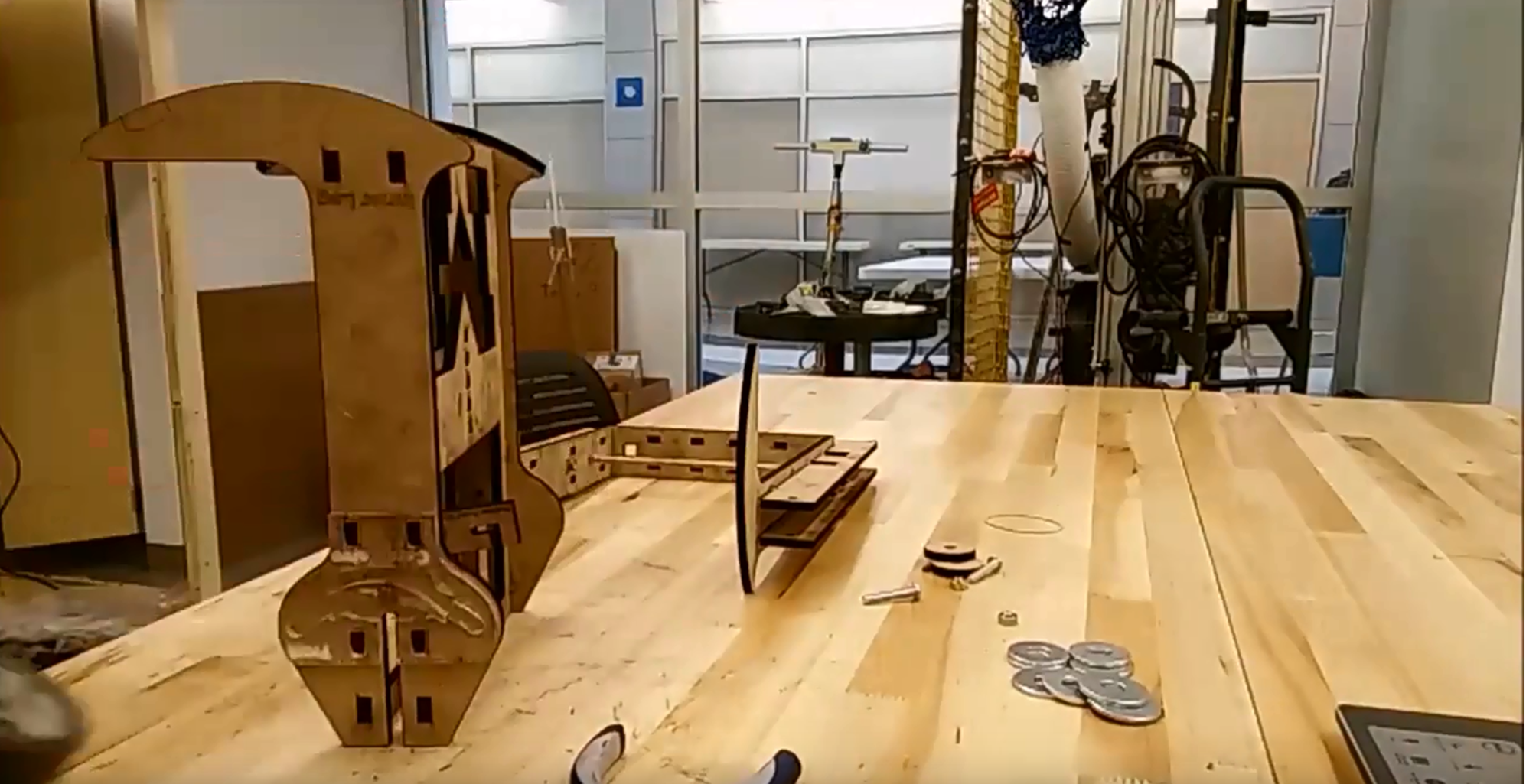
All you need to build a Moonwalker is a laser cutter and some simple tools. The materials you'll need are listed in the Build Guide& and the CAD and laser cutter files will give you everything you need to cut the parts. If you do not have access to a laser cutter, Ponoko can laser cut them for you using these files, however the cost is significantly higher. It might be more cost-effective to join a local maker space or similar subscription program that offers laser cutter use. We also have instructions prepared for teachers or event coordinators interested in helping kids build Moonwalkers for a class or educational program.
The Design Team
The Moonwalker was developed for a senior design project by a team of four undergraduate students at the University of Michigan, Ann Arbor: Benjamin Dussault, Kevinski Himawan, Emily Kellner, and Yuzhou Zhuang. The project goal was to make the walker an open-source design product that any student or hobbyist could download, laser cut, and assemble with minimal additional parts. Starting from a previous proof-of-concept prototype, the winter 2016 Moonwalker team focused on creating a passive dynamic walker that is durable and that can easily and inexpensively be manufactured. By redesigning key components and iterating on design details to increase durability and eliminate unnecessary parts, they were able to create a reliable walker that can be created at a local maker shop for $21.22. This would be ideal for high school students, inspiring them to pursue academic careers in the science, math, and engineering fields. Since the completion of the semester, the project has been extended to also work as a kit for outreach programs.
Kontakt
