Our approach to answer these questions ranges from simulation studies with simple conceptual models to hardware experiments with custom-built legged robots. We also extensively use optimal control as a tool in our research. By setting up realistic models and cost functions, we can let a computer identify energy-optimal motions. We use this approach to develop tools, methods, and design guidelines for the creation of fast and efficient legged robots. In the process, we employ advanced numerical methods such as multiple shooting, direct collocation, and continuation.
{kind=link}
{kind=link}
Matlab Framework for Gait Creation:
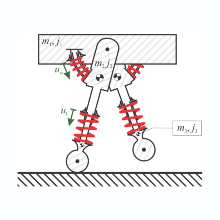
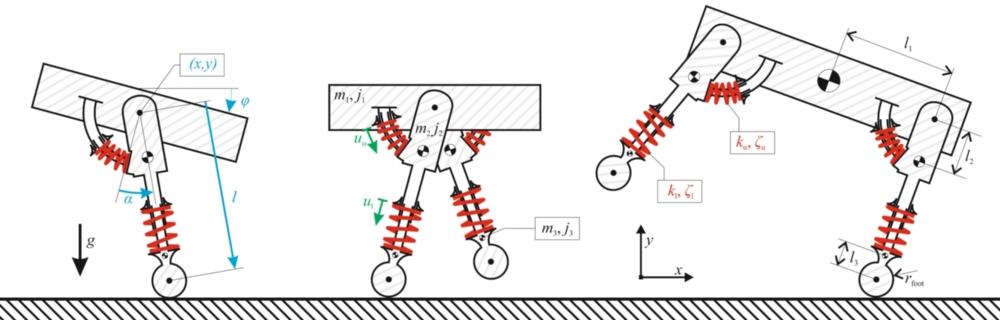
In our past work, we have developed a simple Matlab Framework for optimal gait creation (See this paper for more information). While this is not the most performant implementation (it's Matlab), it is fairly easy to understand and very well documented. So it might be a great starting point on the way into using more advanced tools and methods. The framework contains methods for gait simulation, creation, analysis, and visualization. It comes with a set of models of different complexity, including a 'passive dynamic walker', a 'prismatic hopper', and a 'bounding quadruped'. Please see the README file for more information. The full code is available for download on Bitbucket. We started to include models of others in this software repository. If you want to share your models, just let us know or simply create a pull request on Bitbucket.
A Homotopic Approach for Optimal Gait Generation
- Raff, M., Rosa, M. and Remy, C. D. "Generating Families of Optimally Actuated Gaits from a Legged System's Energetically Conservative Dynamics", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 8866-8872, 2022. [PDF], [IROS]
- Raff, M., Rosa, N. and Remy, C. D. "Connecting Gaits in Energetically Conservative Legged Systems", IEEE Robotics and Automation Letters, Vol. 7(3), pp. 8407-8414, 2022. [PDF], [RAL]
- Yesilevskiy, Y., Yang, W., and Remy, C.D., 2018, "Spine morphology and energetics: How principles from nature apply to robotics", Bioinspiration and Biomimetics, 13(3) [URL]
- Yesilevskiy, Y. Gan, Z., and Remy, C.D., 2018, "Energy-optimal hopping in parallel and series elastic 1D monopeds", ASME J. Mechanisms Robotics, 10:03100801-11 [preprint] [URL]
- Smit-Anseeuw, N., Gleason, R., Vasudevan, R. and Remy, C. D., 2017, "The energetic benefit of robotic gait selection - A case study on the robot Ramone", IEEE Robotics and Automation Letters, 2(2):1124 - 1131 [URL]
- Yesilevskiy, Y., Gan, Z., and Remy, C.D., 2016, "Optimal configuration of series and parallel elasticity in a 2D monoped", IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden[ preprint] [URL]
- Xi, W., Yesilevskiy, Y., and Remy, C.D., 2015, "Selecting gaits for economical locomotion of legged robots", The International Journal of Robotics Research, 35(9):1140-1145 [URL]
- Yesilevskiy, Yevgeniy, Xi, Weitao, and Remy, C.D., 2015, "A comparison of series and parallel elasticity in a monoped hopper", International Conference on Robotics and Automation, (ICRA), Seattle, WA [preprint] [URL]
- Xi, W. and Remy, C.D., 2014, "Optimal gaits and motions for legged robots", International Conference on Intelligent Robots and Systems (IROS), Chicago, IL [preprint]
- Yesilevskiy, Y.and Remy, C.D., 2014, "Series or parallel elasticity - Which is better? ", Dynamic Walking, Zurich, Switzerland [preprint]
- Remy, C.D., Buffinton, K.W., and Siegwart, R. , 2012, "Energetics of passivity-based running with high-compliance series elastic actuation", International Journal of Mechatronics and Manufacturing Systems, 5(2):120-134 [link to preprint] [URL]
- Yesilevskiy, Y.*, Gan, Z*.Xi, W.*, Remy, C.D. (* the authors contributed equally to this work), 2015, "From simple to complex models: Gaits as oscillations", International Symposium on Adaptive Motion of Animals and Machines (AMAM), Cambridge, MA [preprint]
- Remy, C.D., Buffinton, K.W., and Siegwart, R. , 2012, "Comparison of cost functions for electrically driven running robots", International Conference on Robotics and Automation (ICRA), St Paul, MN [link to preprint] [URL]
- Remy, C.D., Buffinton, K.W., and Siegwart, R., 2011, "A MATLAB framework for efficient gait creation", International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA [link to preprint] [URL]
- Remy, C.D., 2011, "Optimal exploitation of natural dynamics in legged locomotion", PhD Thesis [preprint] [URL] [bibtex]
Contact

C. David Remy
Prof. Dr.