{kind=link}
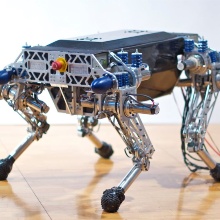
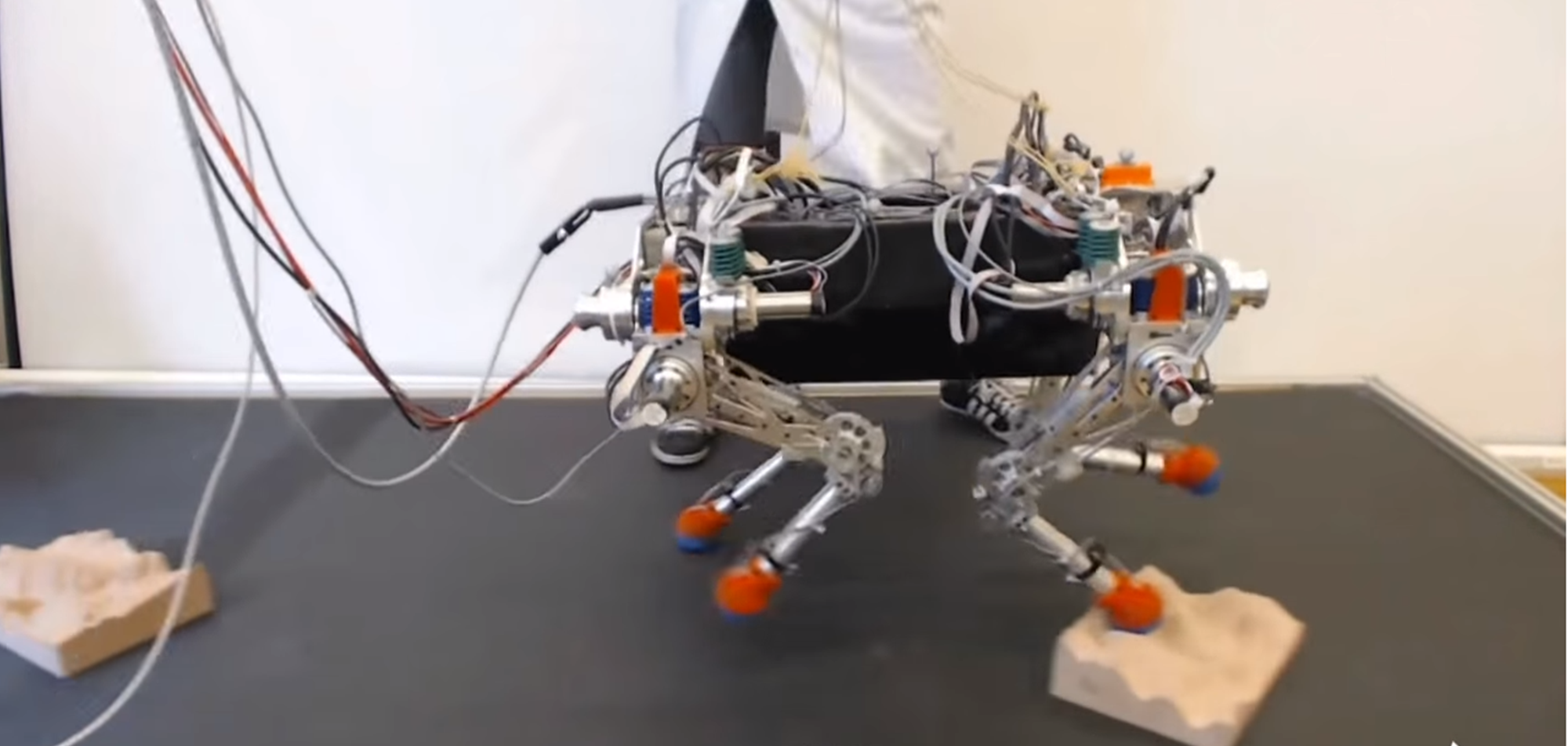
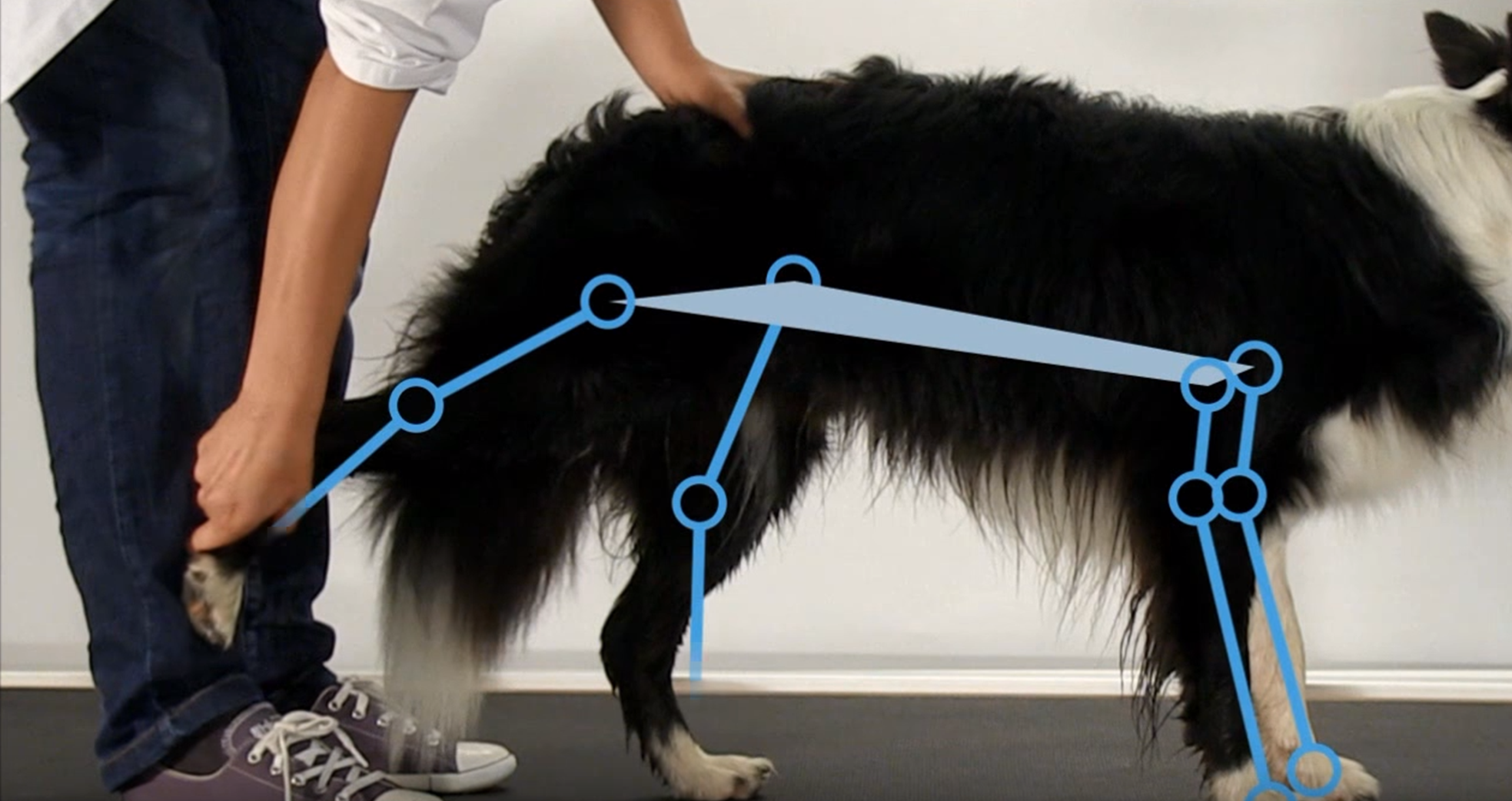
Professor Remy's previous research at the Autonomous Systems Lab (ASL) focused on the design, modeling, simulation, optimization, and control of quadrupedal robots. The work included conceptual simulation studies, as well as extensive work on robotic prototypes. In particular, Prof. Remy was involved in the development of StarlETH, the Springy Tetrapod with Articulated Robotic Legs. This robot is designed to study fast, efficient, and versatile locomotion. StarlETH is a quadrupedal platform with 12 actuated degrees of freedom, which are all driven by series elastic actuators. In the latest version, the robot is able to perform dynamic walking and trotting, with on board energy supply and computation.

{kind=link}
- Hutter, M., Remy, C.D., Hoepflinger, M.H., and Siegwart, R. , 2013, "Efficient and versatile locomotion with highly compliant legs", IEEE/ASME Transactions on Mechatronics, 18(2):449-458 [link to preprint] [URL]
- Remy, C.D., Hutter, M., Hoepflinger, M., Bloesch, M., Gehring, C., and Siegwart, R. , 2012, "Quadrupedal robots with stiff and compliant actuation (Best Postdoctoral Paper Award, NCCR-Robotics, 2012)", at-Automatisierungstechnik, 60(11):682-691 [link to preprint] [URL]
- Bloesch, M., Hutter, M., Hoepflinger, M.H., Remy, C.D. Gehring, C., and Siegwart, R, 2012, "State estimation for legged robots-consistent fusion of leg kinematics and imu", Robotics: Science and Systems (RSS), Sydney, Australia [link to preprint] [URL]
- Hutter, M., Gehring, C., Bloesch, M., Hoepflinger, M.A., Remy, C.D., Siegwart, R., 2012, "StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion", International Conference on Climbing and Walking Robots (CLAWAR), Baltimore, MD (Best Student Paper award) [link to preprint]
- Hutter, M., Hoepflinger, M.H., Gehring, C., Bloesch, M., Remy, C.D., and Siegwart, R. , 2012, "Hybrid operational space control for compliant legged systems", Robotics: Science and Systems (RSS), Sydney, Australia [link to preprint] [URL]
- Remy, C.D., Hutter, M., Hoepflinger M.H., ‘Team Pegasus’, and Siegwart, R., 2011, "ALoF, StarlETH, Pegasus (Hardware Demonstration)", Dynamic Walking, Jena, Germany
- Bloesch, M., Hutter, M., Remy, C.D., and Siegwart, R. , 2012, "Consistent fusion of leg kinematics and inertial measurements for state estimation of legged robots", Dynamic Walking, Pensacola, FL, USA [link to preprint]
- Remy, C.D., 2011, "Optimal exploitation of natural dynamics in legged locomotion", PhD Thesis [preprint] [URL] [bibtex]
- Chumanov, E.S., Remy, C.D., and Thelen, D.G., 2010, "Computational techniques for using insole pressure sensors to analyse three-dimensional joint kinetics", Computer methods in biomechanics and biomedical engineering, 13(5):505-514 [preprint] [URL] [bibtex]
- Remy, C.D. and Thelen, D.G., 2009, "Optimal estimation of dynamically consistent kinematics and kinetics for forward dynamic simulation of gait", Journal of biomechanical engineering, 131(3):31005 [preprint] [URL] [bibtex]
- Chumanov, E.S., Remy, C.D., and Thelen, D.G., 2007, "Tracking the position of insole pressure sensors during walking and running", American Society of Biomechanics (ASB), Palo Alto, CA [preprint] [URL] [bibtex]
- Chumanov, E.S., Remy, C.D., and Thelen, D.G., 2007, "Ground reaction forces during running can be estimated from insole pressure measurements by considering whole body dynamics", North American Congress on Biomechanics, Ann Arbor, MI [preprint] [URL] [bibtex]
- Remy, C.D. and Thelen, D.G., 2007, "Design and evaluation of an adaptive ground contact model", ASME Summer Bioengineering Conference, Keystone, CO [preprint] [bibtex]
- Remy, C.D. and Thelen, D.G., 2007, "Optimal estimation of dynamically consistent kinematics and kinetics for forward dynamic simulations", ASME Summer Bioengineering Conference, Keystone, CO [preprint] [URL] [bibtex]
- Remy, C.D., Siegwart, R., and Thelen, D.G., 2007, "Optimal estimation of dynamically consistent kinematics and kinetics for forward dynamic simulations (Poster Presentation)", Dynamic Walking, Åland, Finland [link to preprint]
- Remy, C.D., 2006, "Integration of an adaptive ground construct model into the dynamic simulation of gait", Master Thesis [preprint] [URL] [bibtex]
Kontakt
